Top C++ Embedded Systems Programming Tips for Beginners
Category: Embedded Systems
Mastering C++ in Embedded Systems: Essential Tips to Accelerate Your Projects
If you're diving into the world of embedded systems programming with C++, you likely already have some programming know-how but need practical, effective tips to bridge the gap between theory and real-world project success. Whether you're a tech enthusiast working on Raspberry Pi or microcontroller projects or a developer expanding your embedded systems expertise, you understand the complexities of optimizing C++ code under hardware constraints and real-time demands. This post cuts through the noise by focusing on actionable programming tips that make a tangible difference—from memory management strategies and hardware interfacing best practices to debugging techniques tailored for embedded environments. Unlike generic tutorials, this guide addresses your specific challenges with performance, resource limitations, and portability, giving you clear, concise advice you can implement immediately. By the end, you will have a toolkit of C++ programming insights designed to enhance your embedded projects' reliability and efficiency. Read on to learn how to write better embedded C++ code and power your next microcontroller or Raspberry Pi application to success.
- Mastering C++ in Embedded Systems: Essential Tips to Accelerate Your Projects
- Understanding the Constraints: Embedded System Memory and Performance Limitations
- Efficient Use of C++ Features: Leveraging Classes, Templates, and constexpr in Embedded
- Best Practices for Memory Management: Avoiding Dynamic Allocation and Using RAII
- Hardware Abstraction Techniques: Writing Portable and Maintainable Code
- Leveraging Modern C++ Standards (C++11/14/17) in Embedded Development
- Debugging and Testing Embedded C++ Code: Tools and Strategies
- Interrupt Handling and Real-Time Programming Considerations
- Optimizing Code Size and Speed: Compiler Settings and Inline Functions
- Integrating Embedded C++ with Python and Scripting for Rapid Prototyping
- Common Pitfalls and How to Avoid Them in Embedded C++ Projects
Understanding the Constraints: Embedded System Memory and Performance Limitations
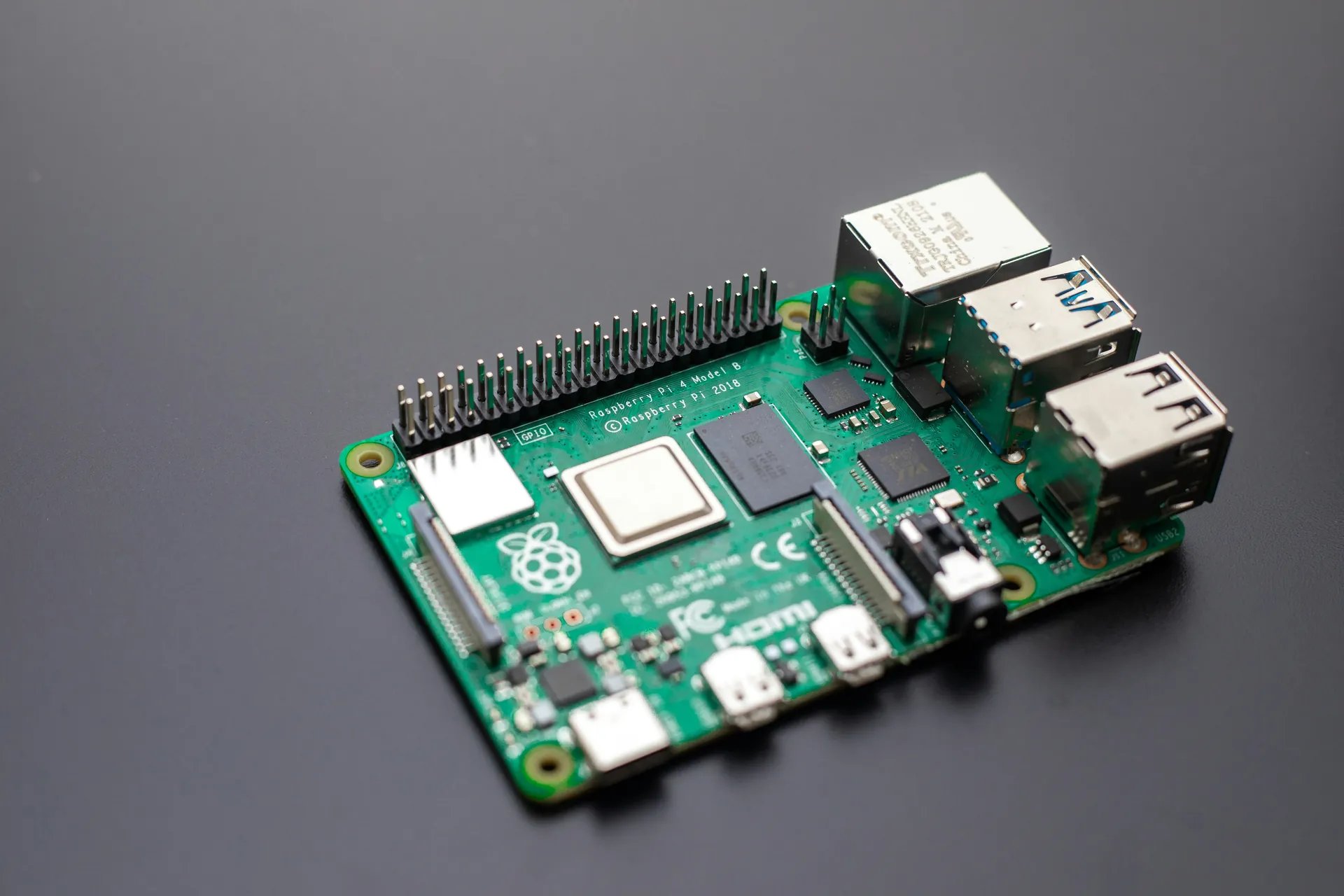
When programming embedded systems in C++, one of the most critical challenges is working within strict memory and performance limitations. Unlike desktop or server environments where abundant RAM and processing power are standard, embedded devices—such as microcontrollers and Raspberry Pi models—often operate with kilobytes to a few megabytes of memory and limited CPU capabilities. This reality demands a strategic approach to managing resources efficiently to ensure your application runs reliably and responsively.
Key Memory Constraints
- Limited RAM and Flash Storage: Embedded systems frequently have constrained SRAM (static RAM) for dynamic data and limited flash memory for storing firmware and constants. Excessive dynamic memory allocation or large static buffers can exhaust these resources, leading to crashes or degraded performance.
- Fragmentation Risks: Frequent use of heap allocations (
newanddeletein C++) can cause memory fragmentation, which is detrimental in long-running embedded applications. - Non-Volatile Memory Usage: Properly placing constants and read-only data in flash memory instead of RAM is essential to conserve precious SRAM.
Performance Limitations
- Processor Speed: Most microcontrollers run at tens to a few hundred megahertz, much slower than desktop CPUs, requiring optimized loops and minimal CPU waste.
- No Operating System or Lightweight RTOS: Many embedded systems lack complex OS features; thus, your code must be efficient at handling hardware directly and managing timing constraints.
- Energy Efficiency: In battery-powered or energy-harvesting devices, minimizing CPU cycles and memory accesses is crucial to maximizing runtime.
Best Practices to Navigate These Constraints
- Prefer static memory allocation over dynamic allocation to prevent fragmentation and unpredictable delays.
- Use compile-time constants and leverage the
constexprkeyword to push computations to compile time, reducing runtime overhead. - Optimize data types to use the smallest appropriate size (e.g.,
uint8_tinstead ofint) to save memory. - Avoid heavy C++ abstractions that generate unnecessary code bloat; focus on zero-cost abstractions and inline functions.
- Leverage hardware-specific features such as Direct Memory Access (DMA) and hardware timers to offload work from the CPU.
Understanding these embedded system constraints upfront and designing your C++ code accordingly will enable you to create robust, efficient applications well-suited for the tight memory and performance budgets inherent in Raspberry Pi microcontroller projects and other embedded platforms.

Image courtesy of Athena Sandrini
Efficient Use of C++ Features: Leveraging Classes, Templates, and constexpr in Embedded
Modern C++ offers powerful features that, when used thoughtfully, can significantly enhance embedded system programming on platforms like Raspberry Pi and microcontrollers. Key among these are classes, templates, and the constexpr keyword, which enable you to write clean, reusable, and highly efficient code that respects embedded constraints. Rather than viewing C++ abstractions as potential overhead, you can harness these language tools to create zero-cost abstractions—meaning abstractions that incur no runtime penalty—critical in resource-constrained environments.
Leveraging Classes for Modularity and Maintainability
Using classes allows you to encapsulate hardware interfaces and application logic cleanly, improving code organization and maintainability. Designing lightweight classes with minimal virtual functions avoids extra overhead. Prefer stack allocation of objects over dynamic allocation when possible. This prevents heap fragmentation and leans on fast, deterministic memory management suited for embedded systems.
Harnessing Templates for Compile-Time Flexibility
Templates are invaluable in embedded development because they enable generic programming without runtime cost. For instance, you can create templated drivers that adapt to different peripheral configurations at compile time, generating highly optimized, specialized code paths. Templates also facilitate type-safe abstractions and reduce code duplication, which helps keep your firmware size small—a critical advantage for constrained flash memory environments.
Maximizing Compile-Time Computation with constexpr
The constexpr keyword empowers you to perform calculations during compilation, reducing the need for runtime processing. This translates directly into smaller, faster embedded programs. Use constexpr functions and variables to define constant lookup tables, configuration parameters, or mathematical computations baked into the binary. By shifting logic to compile-time, you conserve CPU cycles and RAM, enhancing both performance and energy efficiency.
Best Practices for Embedded C++ Features
- Minimize runtime polymorphism: Avoid virtual functions unless absolutely necessary; prefer template-based polymorphism or static polymorphism (CRTP) to eliminate vtable overhead.
- Prefer
constexprevaluation: Useconstexprliberally to optimize constants and computations, but validate compiler support on your target embedded toolchain. - Keep classes lightweight: Avoid heavy inheritance chains or large classes—focus on POD (Plain Old Data) types when feasible.
- Use templates for peripheral abstraction: Implement peripheral drivers and utilities as templated classes to reduce redundant code and tailor implementations precisely.
- Enable inlining: Mark critical small functions as
inlineor define them inside class declarations to encourage compiler optimizations.
By strategically leveraging classes, templates, and constexpr, embedded C++ programmers can build modular, reusable, and high-performance code without sacrificing the tight resource requirements of microcontroller and Raspberry Pi projects. These language features let you deliver sophisticated functionality efficiently, making your embedded applications both powerful and lean.
Image courtesy of luis gomes
Best Practices for Memory Management: Avoiding Dynamic Allocation and Using RAII
In embedded systems programming with C++, effective memory management is paramount to achieving reliable and efficient applications on platforms like Raspberry Pi and microcontrollers. One of the cardinal rules for embedded developers is to minimize or entirely avoid dynamic memory allocation (new and delete) during runtime. Heap allocations can cause memory fragmentation, unpredictable latency, and even system crashes—issues that are costly in environments with limited RAM and real-time constraints.
Avoiding Dynamic Memory Allocation
Instead of relying on dynamic allocation, favor static and stack-based memory management wherever possible. This approach ensures deterministic memory usage and avoids the pitfalls associated with heap fragmentation. For example:
- Use fixed-size arrays or statically allocated buffers for data structures when the maximum size is known at compile time.
- Leverage stack allocation for temporary objects within functions, as stack usage is typically faster and automatically cleaned up.
- Pre-allocate memory pools if dynamic data structures are required, allowing you to control and recycle memory efficiently without fragmentation.
Embracing RAII (Resource Acquisition Is Initialization)
C++’s RAII paradigm is a powerful ally in embedded development to manage resources safely and automatically. By encapsulating resource management—such as memory buffers, peripheral handles, or mutex locks—within objects whose lifetimes are bound to scope, RAII eliminates many common bugs like resource leaks and dangling pointers.
For embedded systems, RAII:
- Ensures automatic cleanup of resources when objects go out of scope, minimizing manual error-prone deallocation.
- Enables exception-safe resource management if your embedded environment supports exceptions, maintaining system stability.
- Encourages the design of small, self-contained classes that manage hardware interfaces or memory buffers transparently.
Key Memory Management Tips for Embedded C++
- Prefer stack allocation over heap for most objects to maximize speed and reliability.
- Use RAII wrappers for peripherals and dynamically managed resources, such as smart pointers with custom allocators if dynamic memory cannot be avoided.
- Avoid global or static mutable data to reduce side effects and improve testability.
- Carefully monitor memory usage during development with tools tailored for embedded debugging.
- When dynamic allocation is unavoidable, implement strict controls like fixed-size allocators or custom pool managers to mitigate fragmentation risks.
By combining minimal dynamic allocation with RAII-based resource management, embedded C++ programmers can build robust applications that respect the stringent memory constraints of microcontrollers and Raspberry Pi projects. This disciplined approach to memory safeguards uptime and responsiveness, directly contributing to the reliability crucial for embedded systems in real-world scenarios.
Image courtesy of Pixabay
Hardware Abstraction Techniques: Writing Portable and Maintainable Code
In embedded C++ development for platforms like Raspberry Pi and microcontrollers, hardware abstraction is a cornerstone technique that enables your code to be both portable across different devices and maintainable over time. By isolating hardware-specific details behind clean, consistent interfaces, you create a layer that decouples your application logic from the underlying hardware variations. This approach not only simplifies upgrades and scaling but also significantly reduces platform-dependent bugs, which are common pitfalls in embedded projects.
Benefits of Hardware Abstraction in Embedded C++
- Portability: Abstracting peripherals (GPIO, ADC, SPI, UART, etc.) allows you to reuse the same high-level code on different microcontrollers or Raspberry Pi models with minimal changes.
- Maintainability: Encapsulated hardware access means changes in hardware configuration or drivers impact only the abstraction layer, leaving application-level code untouched.
- Testability: A well-defined hardware abstraction layer (HAL) enables easier unit testing and mocking of hardware interfaces, improving code quality and accelerating development.
- Code Clarity: Separating hardware details from application logic results in cleaner, easier-to-understand code, which benefits collaboration and long-term maintenance.
Practical Hardware Abstraction Strategies
- Define Abstract Interfaces: Use pure virtual classes or abstract base classes to specify the behavior expected from hardware components. This enforces a contract for all hardware drivers without binding your logic to concrete implementations.
- Implement Platform-Specific Drivers: Derive concrete classes for each target platform or hardware variant that implement the interface, handling low-level details such as register configuration and timing.
- Leverage Templates for Flexibility: Use template-based interfaces to achieve static polymorphism which reduces runtime overhead while maintaining abstraction benefits.
- Centralize Hardware Initialization: Isolate all hardware setup routines within dedicated modules, making system bring-up predictable and easier to debug.
- Consistent Naming and Documentation: Maintain uniform naming conventions and comprehensive comments for your HAL to support team onboarding and future revisions.
Adopting these hardware abstraction best practices empowers you to write clean, efficient, and resilient embedded C++ code that scales gracefully across multiple hardware platforms. This technique is especially valuable for Raspberry Pi and microcontroller projects where hardware configurations can vary widely but software reliability and portability remain paramount.

Image courtesy of Alessandro Oliverio
Leveraging Modern C++ Standards (C++11/14/17) in Embedded Development
Modern C++ standards, starting with C++11 and continuing through C++14 and C++17, introduce a wealth of language features and library enhancements that can dramatically improve the efficiency, readability, and maintainability of embedded systems programming on platforms like Raspberry Pi and microcontrollers. Far from being just "nice-to-have" additions, these standards offer tools specifically well-suited to addressing common embedded challenges such as resource constraints, code safety, and performance optimization.
Key Modern C++ Features for Embedded Systems
-
Auto Type Deduction (
auto)
Reduces verbosity and helps prevent type mismatches, enabling clearer and more concise code. This not only simplifies development but also reduces the risk of subtle bugs in complex embedded applications. -
Range-based for Loops
Simplifies iteration over arrays and container classes, reducing boilerplate code and improving code clarity. It’s particularly handy when traversing sensor data buffers or communication protocol frames. -
Smart Pointers (
std::unique_ptr,std::shared_ptr)
While dynamic memory allocation should be minimized, smart pointers can be invaluable when used judiciously to manage resource lifetimes automatically and safely—especially on devices running lightweight RTOS or more capable embedded Linux systems like Raspberry Pi. -
nullptrKeyword
Eliminates ambiguity betweenNULLand integer zero, enhancing pointer safety and preventing errors in pointer checks or assignments. -
Lambda Expressions
Allow inline, anonymous functions that can capture variables from their defining scope, enabling flexible callback implementations and event handlers without the overhead of separate function objects. -
constexprEnhancements
Expanded capabilities in C++14 and C++17 allow more complex compile-time computations, supporting even more aggressive optimization in embedded code by reducing runtime overhead. -
enum classfor Strongly Typed Enums
Provides type safety, better scoping, and clearer intent compared to traditional enums, aiding maintainability and code correctness in hardware state management. -
Improved
constexprSTL Containers (C++17 and later)
Embedded developers can now use certain standard containers and algorithms at compile time, enabling more flexible configuration data and lookup tables that do not consume runtime resources.
Best Practices to Embrace Modern C++ in Embedded Projects
- Ensure Toolchain Support: Confirm your embedded compiler fully supports the desired C++ standard version to avoid incompatibilities.
- Use Features Judiciously: Focus on features that add value without significant runtime overhead—like
constexpr,auto, and range-based loops. - Maintain Deterministic Behavior: Avoid features that introduce hidden runtime costs or dynamic memory unless the hardware and RTOS can safely handle them.
- Leverage Modern STL Components with Care: Use standard library features and containers selectively and prefer lightweight alternatives when resource constraints demand.
- Adopt Inline Variables and Template Improvements to reduce code bloat and improve compile-time optimizations.
By leveraging the strengths of modern C++ standards, embedded developers can write more expressive, maintainable, and high-performance code that meets the stringent demands of microcontroller and Raspberry Pi-based systems. These language enhancements empower you to build sophisticated embedded applications with improved safety and efficiency while adapting easily to evolving hardware platforms and requirements.
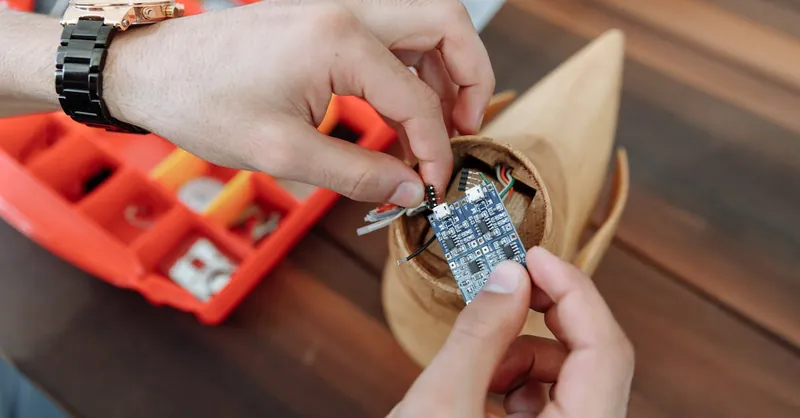
Image courtesy of Thirdman
Debugging and Testing Embedded C++ Code: Tools and Strategies
Debugging and testing are crucial phases in the embedded C++ development cycle, especially on resource-constrained platforms like Raspberry Pi and microcontrollers where visibility into runtime behavior is often limited. Effective debugging and testing techniques ensure that your firmware is reliable, performant, and resilient under real-world conditions. Employing the right debugging tools and testing strategies can drastically reduce development time and improve code quality, turning complex embedded challenges into manageable tasks.
Essential Debugging Tools for Embedded C++
-
In-Circuit Debuggers (ICDs) and JTAG/SWD Interfaces
Hardware debuggers provide real-time access to your microcontroller’s memory, registers, and execution flow. Utilizing tools like JTAG or SWD interfaces lets you set breakpoints, single-step through code, and inspect variables without the need for intrusive print statements. -
Serial Output and Logging
Sending debug information over UART or USB serial ports remains a simple yet effective way to monitor program flow and variable states, particularly when hardware debugging interfaces are unavailable. -
Logic Analyzers and Oscilloscopes
These tools help debug timing-critical issues by capturing GPIO signals, peripheral interfaces (SPI, I2C), and interrupts, enabling correlation between hardware events and software execution. -
On-Board Debugging Features and Built-in Self-Test (BIST)
Modern microcontrollers often include watchdog timers, error detection peripherals, and memory protection units that aid in detecting and recovering from faults dynamically.
Testing Strategies for Embedded C++ Projects
-
Unit Testing: Isolate and verify individual components or classes using frameworks adapted for embedded systems, such as GoogleTest or lightweight unit test libraries designed for microcontrollers. Writing modular, testable code (often facilitated by hardware abstraction layers) is key to successful unit testing.
-
Integration Testing: Gradually combine tested components and validate their interaction on target hardware or simulators to uncover interface mismatches and timing issues.
-
Simulation and Emulation: Use software simulators or hardware emulators that replicate your embedded target, allowing you to test programs prior to deployment on physical devices, saving time and reducing risks.
-
Static Code Analysis and Code Coverage Tools: Integrate static analyzers to detect potential bugs, memory leaks, and non-compliant code early. Measuring code coverage during tests ensures that critical code paths are exercised thoroughly.
-
Automated Regression Testing: Establish continuous integration (CI) pipelines that automatically build, flash, and test firmware on hardware-in-the-loop (HIL) setups, detecting regressions early in development cycles.
Best Practices to Optimize Debugging and Testing
- Design your embedded C++ code with testability in mind by decoupling hardware dependencies via abstraction layers and dependency injection.
- Use assertions and error handling mechanisms judiciously to catch and handle unexpected conditions during development and testing.
- Maintain comprehensive logging but ensure it can be disabled or minimized in production builds to save resources.
- Document test cases and results rigorously to facilitate maintenance and knowledge transfer.
- Regularly update and calibrate your debugging tools and test environments to reflect hardware revisions and evolving software complexity.
By harnessing robust debugging tools like in-circuit debuggers and logic analyzers, alongside comprehensive testing approaches including unit, integration, and regression testing, embedded C++ programmers can significantly enhance firmware reliability and reduce development risk. These practices are vital for Raspberry Pi and microcontroller projects where unpredictable hardware behavior and tight real-time constraints demand meticulous validation and error detection from early development through deployment.
Image courtesy of Craig Dennis
Interrupt Handling and Real-Time Programming Considerations
In embedded C++ development for Raspberry Pi and microcontroller projects, interrupt handling and real-time programming are critical pillars that govern the responsiveness and reliability of your applications. Given the tight timing constraints and the need for deterministic behavior in many embedded systems, mastering how to write efficient interrupt service routines (ISRs) and design your code for real-time operation is essential.
Best Practices for Interrupt Handling in Embedded C++
-
Keep Interrupt Service Routines (ISRs) Short and Fast
ISRs should execute as quickly as possible to minimize latency and avoid blocking other critical interrupts. Offload complex processing to the main program loop or deferred task queues via flags or buffers. -
Use
volatileKeyword Wisely
Variables shared between ISRs and the main code must be declaredvolatileto prevent compiler optimizations that could lead to stale or inconsistent values, ensuring reliable data communication between contexts. -
Prioritize Interrupts Appropriately
Configure interrupt priorities based on the urgency and timing requirements of different hardware events. This ensures that high-priority tasks preempt less critical ones, maintaining real-time responsiveness. -
Avoid Blocking Calls and Heavy Computation in ISRs
Functions likeprintf, dynamic memory allocation, or lengthy loops can introduce unpredictable delays. Instead, signal the main code to handle these operations. -
Protect Shared Resources with Care
When accessing shared variables or hardware registers from both ISRs and main code, implement synchronization mechanisms such as disabling interrupts briefly or using atomic operations to prevent data corruption.
Real-Time Programming Considerations
-
Deterministic Timing
Design your embedded system so that critical code paths execute within guaranteed time bounds. Avoid unpredictable delays (e.g., due to dynamic memory allocations, system calls, or blocking I/O) that can violate real-time constraints. -
Use Real-Time Operating Systems (RTOS) When Appropriate
For projects requiring multitasking and precise timing, leverage lightweight RTOS solutions compatible with C++ to manage tasks, scheduling, and synchronization more effectively without heavy overhead. -
Minimize Priority Inversion and Deadlocks
Implement priority inheritance and carefully design locking mechanisms to prevent lower-priority tasks from blocking higher-priority ones, ensuring smooth real-time operation. -
Consider Power and Performance Trade-offs
Real-time responsiveness often competes with energy efficiency. Balance CPU idle times, sleep modes, and interrupt frequency to optimize power consumption without sacrificing timeliness.
By integrating efficient interrupt handling techniques and adhering to real-time programming principles, embedded C++ developers ensure that their Raspberry Pi and microcontroller projects not only meet strict timing requirements but also maintain system stability and responsiveness under diverse operational conditions. These practices are indispensable for applications ranging from sensor data acquisition and motor control to communication protocol management in embedded systems.

Image courtesy of Thirdman
Optimizing Code Size and Speed: Compiler Settings and Inline Functions
In embedded C++ development on platforms like Raspberry Pi and microcontrollers, optimizing both code size and execution speed is crucial to meet the tight resource constraints and real-time requirements typical of embedded systems. Two key strategies to achieve this are carefully selecting compiler optimization settings and effectively utilizing inline functions to reduce function-call overhead without inflating your binary size unnecessarily.
Compiler Optimization Settings for Embedded Systems
Modern embedded C++ compilers, such as GCC and Clang, provide various optimization levels tailored to balance code size and performance. Choosing the right optimization flags can substantially impact how your firmware executes and fits into limited memory.
-
-Os (Optimize for Size):
This setting instructs the compiler to generate the smallest possible code, which is ideal when flash memory is highly constrained. It still performs many optimization techniques while aggressively reducing code footprint. -
-O2 and -O3 (Optimize for Speed):
These flags enable more aggressive optimizations to enhance execution speed, often at the cost of larger binary size. Use these when the performance of critical code paths is paramount, and hardware resources permit. -
-flto (Link Time Optimization):
This option allows the compiler to perform whole-program optimization across translation units, resulting in better inlining and dead code elimination, enhancing both speed and size. -
-ffunction-sections and -fdata-sections with --gc-sections:
These options help the linker remove unused functions and data sections, further trimming the binary size. -
Target-Specific Flags:
Enable CPU-specific optimizations (e.g.,-mcpu=cortex-m4) to leverage hardware capabilities like SIMD or instruction pipelining.
Best Practices for Compiler Settings
- Profile Critical Code Paths: Benchmark your code with different optimization levels to find the best trade-off for your application.
- Avoid Over-Optimization: Excessive optimization can sometimes introduce subtle bugs or make debugging harder; test thoroughly.
- Use Debug-Friendly Flags in Development: During debugging, compile with lower optimization (
-O0or-Og) to retain readable symbol information.
Inline Functions to Improve Speed and Reduce Overhead
Inlining replaces a function call with the actual function code, eliminating the overhead of jumps and stack manipulation. This can be a powerful tool in embedded C++ for speeding up small, frequently called functions like hardware register accessors or small utility routines.
- Mark small, performance-critical functions as
inlineor define them inside class declarations to encourage compiler inlining. - Use the
constexprkeyword for functions that can be evaluated at compile time, effectively inlining their results and saving runtime cycles. - Beware of excessive inlining of large functions, as this can bloat your binary and negatively affect cache behavior.
- Combine inline functions with templates for zero-cost abstractions that compile down to minimal, efficient code.
Key Takeaways
Optimizing embedded C++ code size and speed requires a balanced approach combining prudent compiler settings with judicious use of inline functions. Leveraging compiler optimization flags like -Os or -O2 tailored to your application’s constraints can yield substantial benefits. Meanwhile, inline functions help minimize function call overhead without compromising modularity or maintainability. Together, these techniques enable you to write lean, high-performance firmware optimized for the limited resources of Raspberry Pi microcontrollers and similar embedded platforms, ultimately improving both responsiveness and energy efficiency in your projects.
Image courtesy of Pixabay
Integrating Embedded C++ with Python and Scripting for Rapid Prototyping
Combining the performance and efficiency of embedded C++ with the simplicity and flexibility of Python scripting can significantly accelerate development cycles, especially in rapid prototyping phases of Raspberry Pi and microcontroller projects. Embedded C++ excels at low-level hardware control and real-time performance, while Python offers quick iteration, extensive libraries, and ease of use for higher-level logic, data processing, and automation tasks.
Benefits of Integrating Embedded C++ with Python
-
Faster Development Loop:
Python scripts can serve as a testing harness, sending commands and receiving data from embedded firmware via serial, network sockets, or USB interfaces. This interactive setup allows developers to tweak parameters, test hardware behavior, and validate algorithms without recompiling embedded code repeatedly. -
Leveraging High-Level Libraries:
Python’s rich ecosystem for data visualization, machine learning, or communication protocols can complement embedded C++ firmware. For example, sensor data collected by embedded C++ can be streamed to a Python script for real-time analysis or cloud integration, dramatically expanding your project's capabilities. -
Cross-Platform Scripting:
Python can operate on various host platforms (Linux, Windows, macOS), enabling remote control and automation of embedded devices during development and deployment stages.
Effective Strategies for Embedded C++ and Python Interoperability
-
Use Serial Communication (UART or USB): Establish a simple, robust protocol where embedded C++ firmware listens for commands and transmits status or sensor data back to Python scripts. Protocols can be text-based (e.g., JSON) or binary for efficiency.
-
Leverage SWIG or pybind11: These tools automate the creation of Python bindings for existing C++ libraries, allowing direct invocation of embedded system functions from Python. This facilitates unit testing and hardware simulation in Python before flashing the device.
-
Embed Python Interpreters Where Feasible: On more capable embedded boards like Raspberry Pi, embedding a lightweight Python interpreter inside C++ firmware enables scripting directly on the device, blending low-level control with high-level scripting dynamically.
-
Utilize Build Automation and Scripting: Employ Python scripts to orchestrate build processes, flashing procedures, and firmware testing, streamlining your continuous integration workflows for embedded projects.
By integrating embedded C++ with Python scripting, you unlock the ability to prototype faster, test more thoroughly, and build smarter hybrid systems that take full advantage of each language’s strengths. This synergy enhances both productivity and innovation potential in embedded development for Raspberry Pi and microcontrollers, ensuring your projects can evolve swiftly from concept to robust implementations.
Image courtesy of Craig Dennis
Common Pitfalls and How to Avoid Them in Embedded C++ Projects
When developing embedded C++ applications for Raspberry Pi and microcontrollers, programmers often encounter common pitfalls that can compromise reliability, performance, and development efficiency. Recognizing these challenges early and applying effective mitigation strategies is crucial to success in constrained embedded environments.
1. Overusing Dynamic Memory Allocation
While dynamic allocation (new and delete) is common in desktop C++ programming, in embedded systems it can lead to heap fragmentation, memory leaks, and unpredictable latency. These problems degrade system stability and are difficult to debug on limited-resource devices.
How to Avoid: - Rely on static and stack allocation wherever possible. - Use fixed-size memory pools or custom allocators if dynamic allocation is unavoidable. - Carefully monitor memory usage with embedded debugging tools during development.
2. Excessive Use of Runtime Polymorphism
Heavy use of virtual functions and inheritance introduces vtable overhead, increases code size, and can impair performance, especially on microcontrollers with limited flash and RAM.
How to Avoid: - Favor static polymorphism using templates or the Curiously Recurring Template Pattern (CRTP) to enforce compile-time polymorphism with zero runtime cost. - Limit use of virtual functions to critical abstraction points where runtime flexibility is absolutely required.
3. Ignoring Hardware Constraints
Developers unfamiliar with embedded-specific limitations may write code assuming abundant memory and CPU speed, resulting in programs that are too large or slow to run effectively on target hardware.
How to Avoid:
- Profile your code on actual hardware early and often.
- Utilize hardware abstraction layers (HAL) to encapsulate platform-specific intricacies.
- Optimize data representations by selecting appropriate fixed-width types (uint8_t, uint16_t) instead of generic types.
4. Insufficient Testing and Debugging
Lack of rigorous testing can leave bugs undetected, allowing runtime errors, race conditions, or resource conflicts to surface only in production environments, where they are costly to fix.
How to Avoid: - Develop modular, testable code using unit tests with hardware abstraction and mock objects. - Employ in-circuit debuggers, serial logging, and static analysis tools to gain insight into runtime behavior. - Automate tests and integrate continuous integration (CI) pipelines tailored for embedded builds.
5. Neglecting Real-Time Requirements
Failing to design with real-time constraints in mind can cause missed deadlines, unresponsive systems, or data loss—effects that are often unacceptable in embedded applications.
How to Avoid: - Keep interrupt service routines (ISRs) short and non-blocking. - Use appropriate RTOS features or carefully crafted scheduling loops. - Avoid unpredictable operations like dynamic memory allocation or blocking I/O in time-critical code paths.
By being mindful of these common pitfalls and proactively applying best practices—such as minimizing dynamic memory usage, leveraging compile-time polymorphism, respecting hardware constraints, prioritizing thorough debugging, and honoring real-time requirements—you will greatly improve the robustness, efficiency, and maintainability of your embedded C++ projects on Raspberry Pi and microcontrollers. This diligent approach ensures your firmware can meet the rigorous demands typical of embedded systems development.

Image courtesy of Thirdman